John von Neumannがコンピュータを提唱してから約半世紀が経とうとして
いる現在、ようやく脳をモデルとした新しいコンピュータの開発が本格的に
始まった。脳から学んだものを工学的に利用するということは以前から行わ
れており、その代表的なものとしてニューラルネットワークの利用が挙げら
れる。これはある分野においては利用価値が認められ、実際に我々の周りの
製品にも採り入れられている。しかしこれは脳の神経構造のほんの一部を
利用したに過ぎず、脳のその複雑な振舞い、さらには意識という領域に関し
ては依然未知のままである。また脳をモデルとして利用する場合、多くは
現在の汎用コンピュータ上でソフトウェアとして実現される。ソフトウェア
で開発する利点はその柔軟性と汎用性にある。しかしその半面、抽象性が
高まってしまう傾向にあるのも事実である。
そこでハードウェアによる実現が考えられる。
つまり脳そのものを工学的に作ってしまおうというのである。
そのものを実現するのであるから抽象性はないといってよいだろう。
さらにハードウェアで実現するということはその実現のための処理速度も
最速のものを利用できることになる。電気を用いたいわゆる電子回路が脳
を実現するのに最も適しているかどうかはわからないが、脳の構造から見
ても現代科学の中で最も有用と思われるのでここでいうハードウェアによ
る実現とは電子回路による実現ということとする。一方ハードウェアはソ
フトウェアに比べ柔軟性が乏しくなる傾向にある。これはいわゆるソフト
ウェアがコンピュータ上で電気を用いてアルゴリズムやデータを記録して
動作するのに対し、ハードウェアはワイヤの結線や部品の組合せという
物理的な接続でアルゴリズムを構築するため変更が困難であるからである。
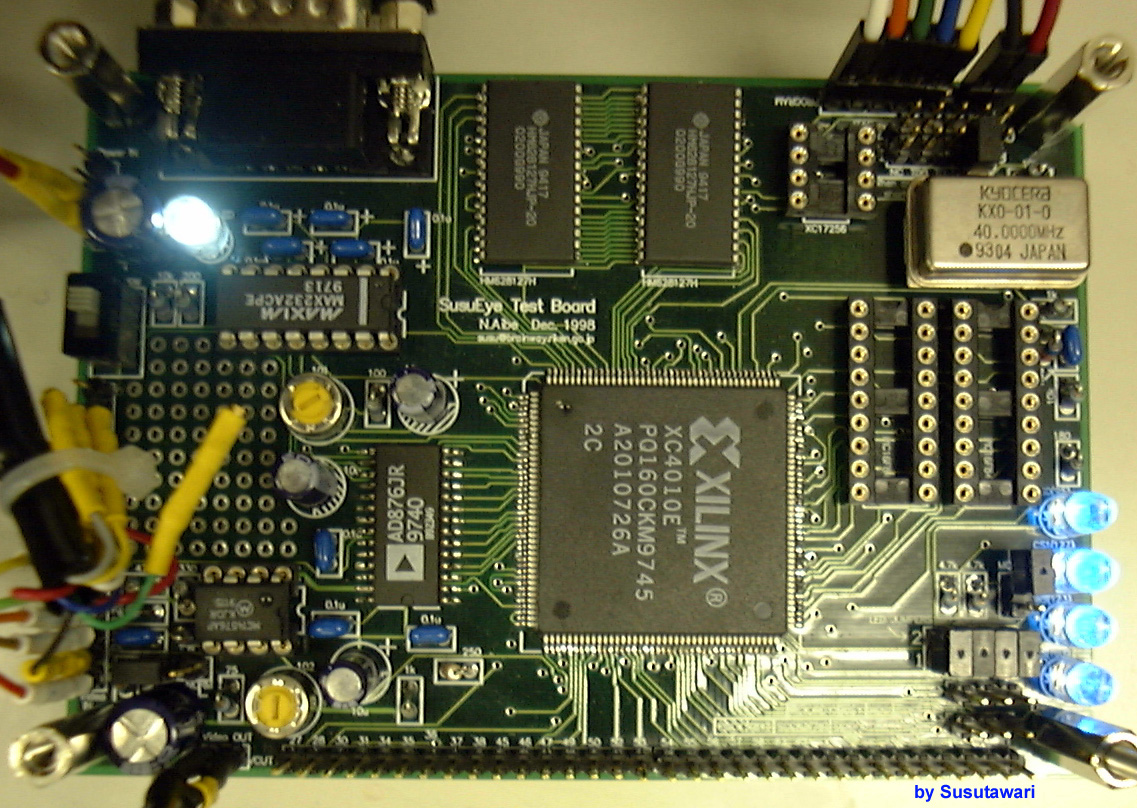
そこでFPGAが有用となる。